





清水 正宏
(しみず・まさひろ)
Masahiro Shimizu
略歴
- 名古屋大学大学院工学研究科博士後期課程計算理工学専攻 短縮修了
- 東北大学大学院工学研究科助手・助教、大阪大学大学院情報科学研究科准教授、大阪大学大学院基礎工学研究科准教授を経て本学へ
- 2004年10月 IROS2004 Best Paper Award
- 2005年9月 日本ロボット学会第20回研究奨励賞
- 2007年2月 2006年度 計測自動制御学会学術奨励賞 研究奨励賞
- 2009年10月 IROS2009 Best Paper Finalist
バイオロボティクス研究室
卒業研究テーマ例
- 自発的に駆動する脳オルガノイド駆動型サイボーグの開発
- 機械と生体筋組織の融合したロボットの適応的運動発現
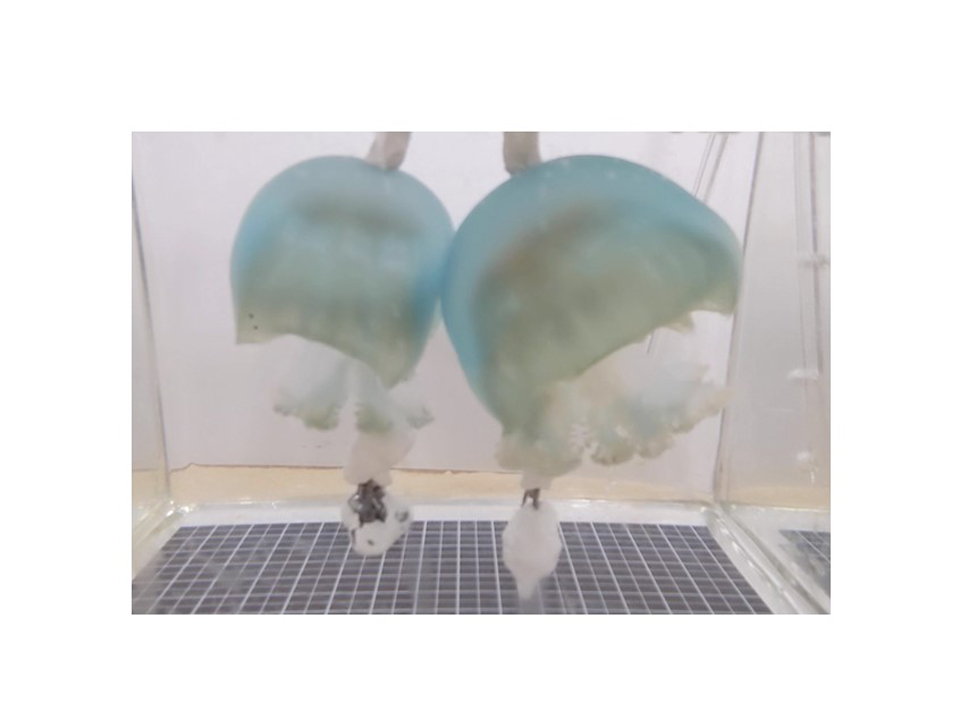
- クラゲ遊泳における個体間相互引き込み現象の解析
自己改変する生体機械融合システム
環境との相互作用から知的能力を発現する自律分散システム
生体由来マテリアルでパッケージングされた身体を有する人工知能システム
- 研究の応用領域
- 医療IT機器産業、サイボーグ型再生医療、本質を可視化する先進的生物学教育
- 産官学連携で求めるパートナー
- 生体と機械のインタフェース開発、生物知能の可視化、生物学と工学の連携の具体的手段を探している方
Due to the development of regenerative medicine technology and iPS cell-related technology in recent years, it is becoming possible to reconstruct not only simple living tissues but also some living organs. At this stage, these techniques are limited to pathological applications such as reproducing specific disease states. We have been developing a cyborg that directly incorporates cells as soft and intelligent parts in order to develop a new intelligent system that connects and controls machines and living organisms.
Self-modifying bio-machine hybrid system
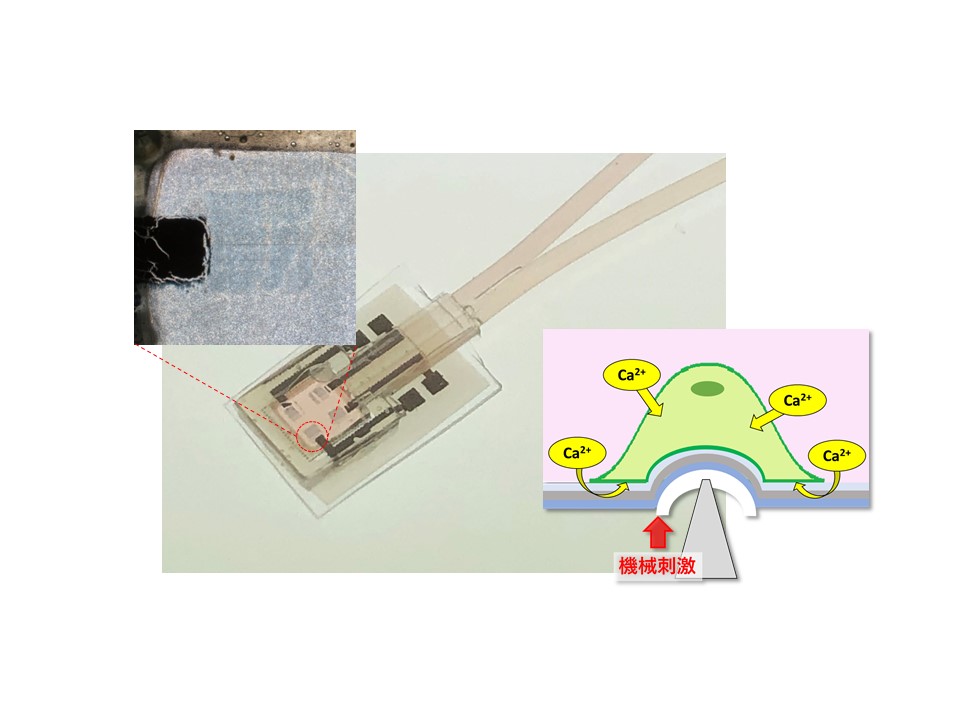
We aim for an intelligent mechanical system that self-modifies by applying the mechanical stimulus-response of cells. Researchers in Japan and overseas have revealed that mechanical stimuli can modify cell functions and even differentiation pathways. Mechanical stimulation, which is an engineering technology, has shown the possibility of manipulating a living body as if it were a robot device. Based on the findings, we hope to construct an intelligent system that acquires the ability to self-modify (grow, replicate, self-repair) depending on the situation.
Autonomous decentralized system that expresses intelligent ability through interaction with the environment
Even primitive species such as true slime molds exhibit intelligent behavior through interaction with the environment. While such phenomena are biologically interesting, their mechanisms can be generalized and abstracted from an engineering point, and applications in industrial and educational fields can also be expected. We are analyzing the group behavior of jellyfish, synchronization phenomena, and application to robots.
Artificial intelligent system with a body packaged with biomaterials
By applying an appropriate stimulus to muscle cells, it is possible to develop an actuator that can extract mechanical output. Conventionally, it was necessary to use external devices such as a pulse generator to drive muscle cells. In this research, we aim to develop an artificial intelligent system with a body that is packaged only with biomaterials by directly connecting living muscle tissue and brain organoids. This makes it possible to create “living machines” based on principles that are completely different from conventional robots.
石黒章夫,清水正宏,粘菌に学んだ変幻自在のロボット,粘菌 ~驚くべき生命力の謎~.(株)誠文堂新光社,116-117 (2007)
清水正宏,梅舘拓也,細田耕,小椋利彦,「成長」する機械をめざして.日本機械学会誌2019年4月号,15-17 (2019)
M. Shimizu, T. Fujie, T. Umedachi, S. Shigaki, H. Kawashima, M. Saito, H. Ohashi and K. Hosoda, Self-healing Cell Tactile Sensor Fabricated Using Ultraflexible Printed Electrodes, in Proc. of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2020), 8932-8938 (2020)
K. Furusawa, R. Teramae, H. Ohashi and M. Shimizu, Development of Living“Bio-Robots”for Autonomous Actuations. Journal of Robotics and Mechatronics, Vol.34 No.2, doi: 10.20965/jrm.2022.p0279 (2022)
V. A. Webster-Wood, M. Guix, N. W. Xu, B. Behkam, H. Sato, D. Sarkar, S. Sanchez, M. Shimizu, K. K. Parker, Biohybrid Robots: Recent progress, challenges, and perspectives, Bioinspir. Biomim., in press, https://doi.org/10.1088/1748-3190/ac9c3b (2022)