




資源の乏しい日本が、技術立国として他国の先を行き、他国が模倣できないほどの最先端の科学技術を創出し続けるために、今、注目を浴びている技術分野が、ビッグデータ解析と人工知能、そしてロボット産業 です。
しかし残念ながら日本は、前世紀の末頃より、技術者の海外流出が加速し、大手の家電メーカーはアジア製の廉価な製品に市場を急速に奪われたため、先端研究に対する人的投資も設備投資も圧迫され続けており、上記の科学技術分野においても、欧米に比べ大きく遅れを取っているのが実情です。
2016 年末にはグーグルが賞金総額 30 億円を投じて、政府系や軍関係以外の小規模なベンチャーなどを対象にして、月面での自律走行型ロボットの短距離レース「Google Lunar XPRIZE」が開催され、世界中にレースの模様が生中継される予定です。
また、経済の市場予測や医療診断の分野において、各分野の一流の専門家の判断や予測をはるかに超える人工知能エンジン「ワトソン」が、IBMの精力的な研究で着々と進化を続け、ビジネスとしても成功を収めつつあります。
このような自律走行型ロボットや、次世代のAI技術、そして、量子コンピュータなどの様々な先端技術が 有機的に融合することにより、人類がかつて経験したことがないほどの跳躍的な技術革新が、遅くとも20年以内に成し遂げられるものと予想されています。
しかし、本格的な人工知能ロボットが、膨大な数のセンサー群から送られてくる毎秒テラバイト級の入力ストリームをリアルタイムで情報処理し、その結果を直ちに運動システムの制御に生かすためには、途方もないほどのメモリ搭載容量と、現時点では考えられないほどの高速なCPU群が必須となってしまいます。
ここに、現在の人類では乗り越えられないほどの大きな技術の壁が立ちはだかっているように見えます。
ところが、私たちの身近にいる昆虫や動物たちは、ロボットに搭載されたセンサー類などを遥かに超える数のセンサーを触覚や体表上、そして体内にも装備しており、日夜生死をかけて最適な行動戦略を取ることで餌を捕食したり、逆に捕食者から逃れたりしています。そして、長い時間をかけて、生息環境に対して、より適応したフォルムと機能を獲得してきました。
私たちは、生物が持つこのように『したたか』で『しなやか』な環境適応メカニズムに学び、この制御機構を自動車やロボットなどの制御アルゴリズムとして活用する新たな技術パラダイムを提案し、このパラダイムに基づいたロボットの設計思想を、『進化型バイオロイド』アーキテクチャと呼んでいます。
今回の先進的体験学習講座は、世界のどの大学でもまだ実施していない斬新な内容ばかりで、『進化型バイオロイド』の基本メカニズムの一つである、「コネクトーム」という考え方の体験学習からはじめてもらいます。
「コネクトーム」とは、実際の生物の神経回路網を、丸ごと計算機内にプログラムとして移植し、ロボットなどの運動制御に活用するための先端技術の一つです。
ご参加いただく高校生達にとって、できるだけ親しみやすく、分かりやすい実習内容にするため、使用するロボットの試作や、テキストの作成は、高校生と年齢も近い1年生と2年生の学生たちが中心となって制作しています。
こんな意欲的な体験学習をしてみたいと思う高校生のみなさん、ぜひ、参加してみてください。
*詳しくはこちらをご覧ください。
1.はじめに
01_Greetings
2.先進的体験習講座:コネクトームによる人工知能ロボットの設計と製作
02_ExperienceLearning
3.Q&A
03_QandA
4.意欲溢れる若者達の潜在能力を限界まで引出すための和田式寺子屋塾
04_TeachingMethod
5.機械の知能と進化の理論:進化システムの構築
05_Evolution_of_Digital_Life (PDFファイル40M)
6.本学の最新号の『めいこう』で掲載されたロボットの実習の記事
06 meiko_29.4
7.パンフレット
Evolvable_AI_Robot
8.さすらいのプログラマ軍団が創った前人未踏のシステム (経済産業省:IPAの広報誌)
IPA_Wada_Project (PDFのZIP圧縮ファイル)
●対 象:高校 1 年生~3 年生
●定 員:各コースとも最大 8 名を予定(参加申込者の中から選抜します)
●実施日:
上級者向けコース : 2015年12月12日(土) 10時~17時
初級・中級者向けコース : 2015年12月13日(日) 10時~17時
●参加費:無料
●講 師:和田 健之介 (長浜バイオ大学教授、滋賀医科大学客員教授)
・2000 年度:経済産業省・IPA 未踏ソフトウェア・プロジェクト:天才プログラマー認定
・2001 年度:経済産業省・IPA 未踏ソフトウェア・プロジェクト:スーパークリエータ認定
●問い合わせ&申し込み
E-mail:k_wada@nagahama-i-bio.ac.jp
*参加申し込みの際には、氏名とヨミガナの他に、所属する高校名と学年を記載し、 選抜する際の参考となるような、熱いメッセージを添えてください。高校に所属していなくても構いません。その場合は年齢を記載してください。
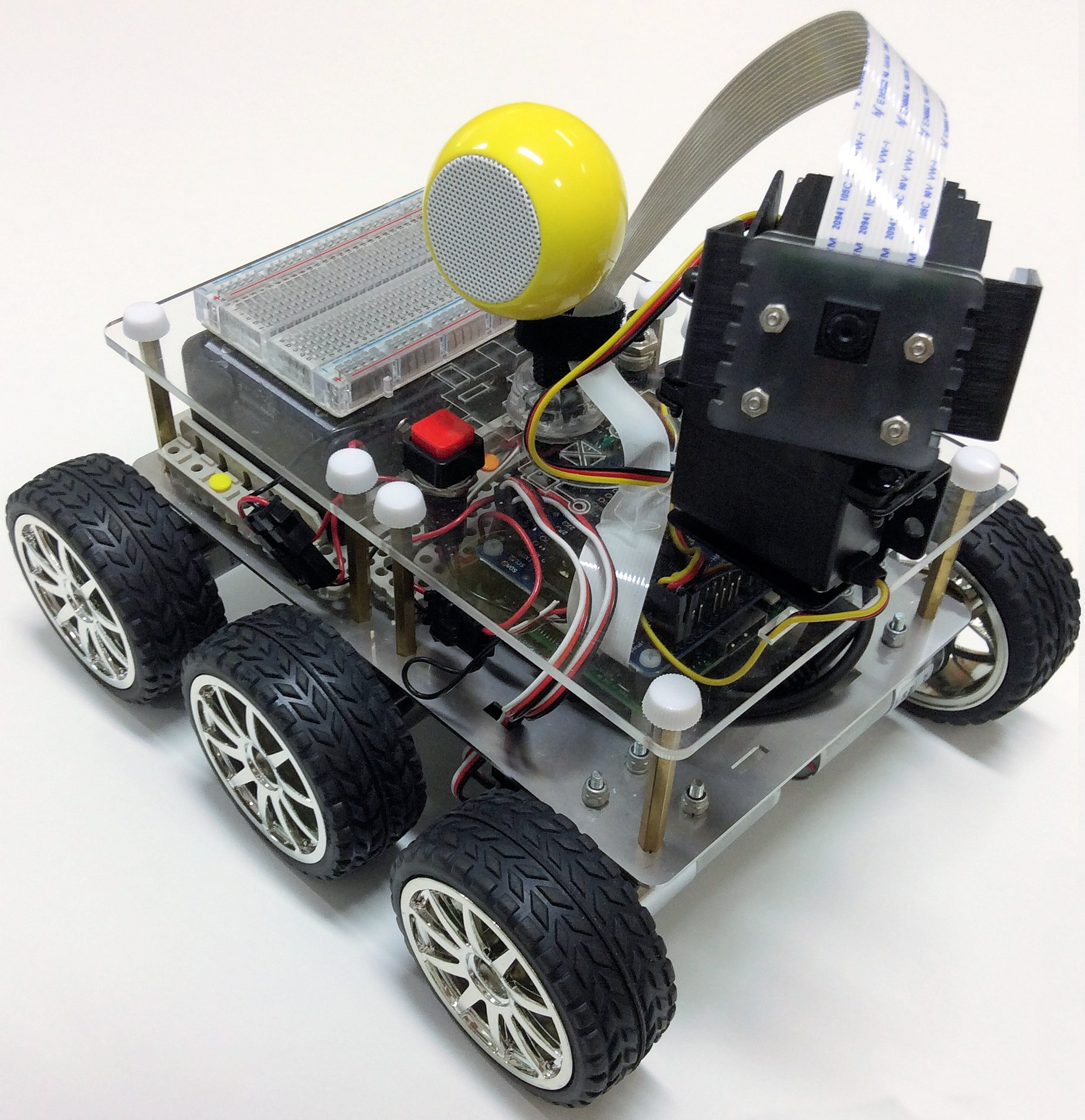
PiBorg 社の DiddyBorg をベースに開発中の自律走行型ロボット

ビジュアルプログラミング が可能な初心者向けのロボット教材 STAR WARS BB-8
【先進的学習体験講座 Q&A】
1.主に対象とする学年について
Q.対象学年はとくに問わないのでしょうか?
A.一切問いません。
2.数学や物理の事前知識について
Q.数学は1年生程度、物理は力学の最初だけの状態でも講義の内容を理解できるでしょうか?
A.もちろん可能です。
3.プログラミングのスキルについて
Q.参加するには、プログラミングの経験はどれくらい必要ですか?
A.一切不要です。
4.講座の所要時間
Q.実施する曜日や講座の所要時間はどれくらいですか?
A.各コースの実施日については、上に記してあるので参照してください。
時間は、
午前 10時~正午 (2時間) 午後1時~午後5時(4時間)
の6時間程度を予定しています。 この中には、
1.業務用 3D プリンタの概要と、超絶技巧を凝らした作品『BrainGear』に触れる
2.脳波によるロボット制御システムの紹介
3.放送業務用3D立体ビデオカメラによる3D動画の記念撮影
4.わずか2千円の3Dビューワと、超有名な Sony HMZ-T1 や Oculus Rift のHMDをかけ比べて、
自分が作成した飛び出る3D動画で酔う体験
5.1テラバイトの超大容量のメモリを搭載した化け物級スパコンの紹介
6.各種ドローンの操作体験とミニプログラムの作成
7.超並列計算による生命パターン誕生の神秘の解明
などの見学やミニ体験の時間も含めております。
5.体験学習の概要
Q.実際にどんなことが学べるのか教えてください。
A.高校生だけでなく小学生でも狂喜乱舞することが必至の近未来SFのような体験学習の一番の盛り上がり部分である、『進化型バイオロイド』の内容につきましては、 ヒ・ミ・ツ(^^♪ とさせていただこうと存じます。
Q.なぜ『進化型』という言葉が前についているのか?
A.単なる『ロボット』ではなく『バイオロイド』とは一体、何なのか?
ということを、いろいろと想像・妄想していただけたらと存じます。 ベースとなるロボットの見た目や、ロボットが動く様子につきましては、例えば http://www.sunfounder.com/index.php?c=videocs&a=vediodetails&typeid=26 のビデオなどをご覧ください。
実際には、このロボットより遥かに高性能なロボットを使用いたします。 国内外における各大学の、機械工学や情報科学、ロボット工学の講義や実習において、 今現在、学生達が学んでいる、オーソドックスな実習内容とは一線を画すというよりも、 比べようもないほどの刺激的な最先端テーマとなっております。
6.引率について
Q.教師の付き添いや補助の必要はありますか?
A.スタッフが全て指導いたしますので、生徒さんのみのご参加で大丈夫ですが、 世界初の非常に興味深い実習内容となりますので、 先生方も是非、ご一緒に体験なさってみてください。
教材を開発中のスタッフを紹介します (*^^)v
 ロボットの3Dデザイン、テキスト制作などを担当: 杉山 美涼 (3回生)
ロボットの3Dデザイン、テキスト制作などを担当: 杉山 美涼 (3回生)
 ネットワーク・プログラミングなどを担当するリードプログラマー: 入江 晋平 (2回生)
ネットワーク・プログラミングなどを担当するリードプログラマー: 入江 晋平 (2回生)
 GUIインターフェース設計、テキスト制作などを担当: 浅井 彩夏 (2回生)
GUIインターフェース設計、テキスト制作などを担当: 浅井 彩夏 (2回生)
 コネクトームなどの生物学的プログラミングを担当: 若松 紘行 (1回生)
コネクトームなどの生物学的プログラミングを担当: 若松 紘行 (1回生)
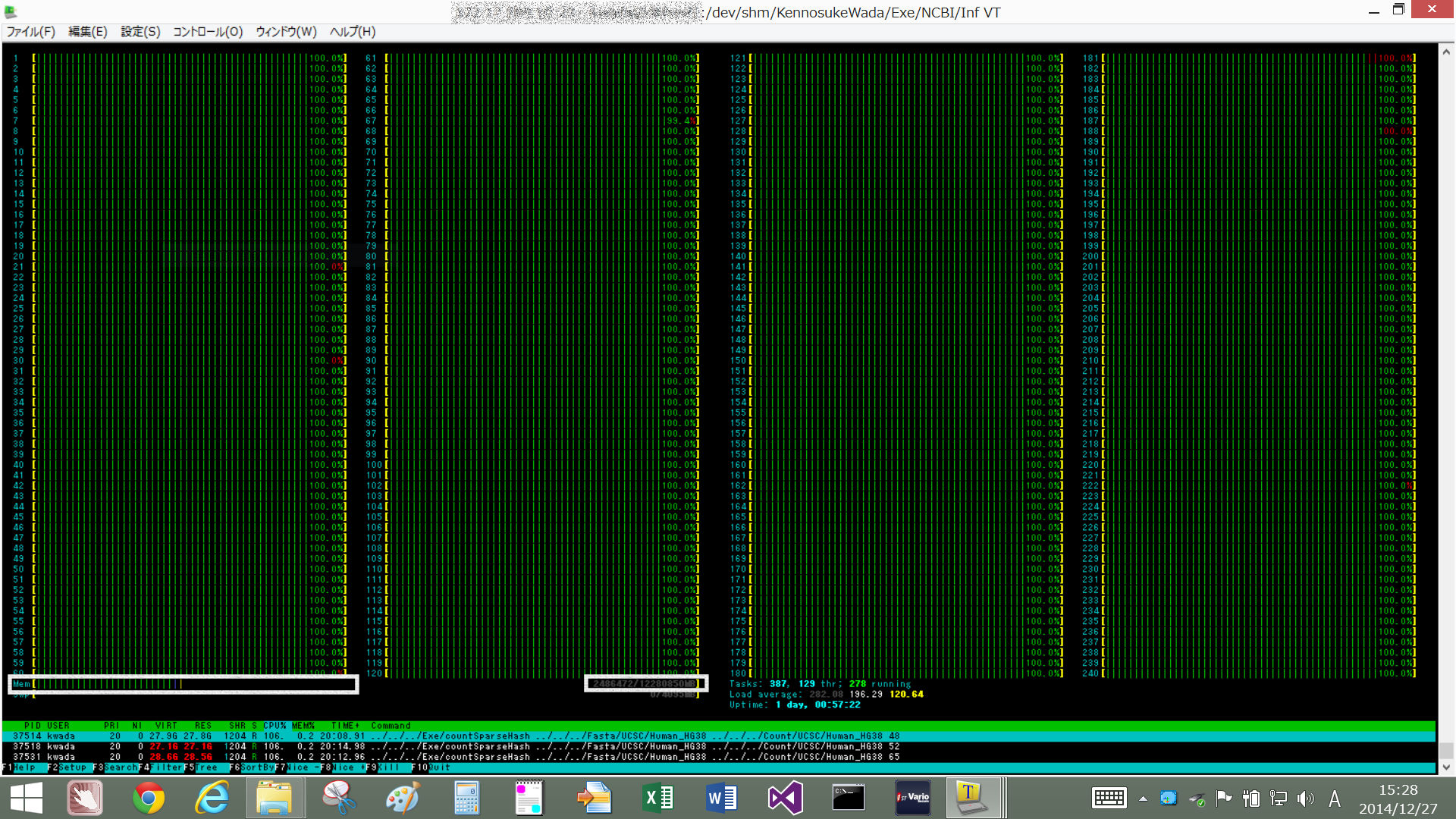
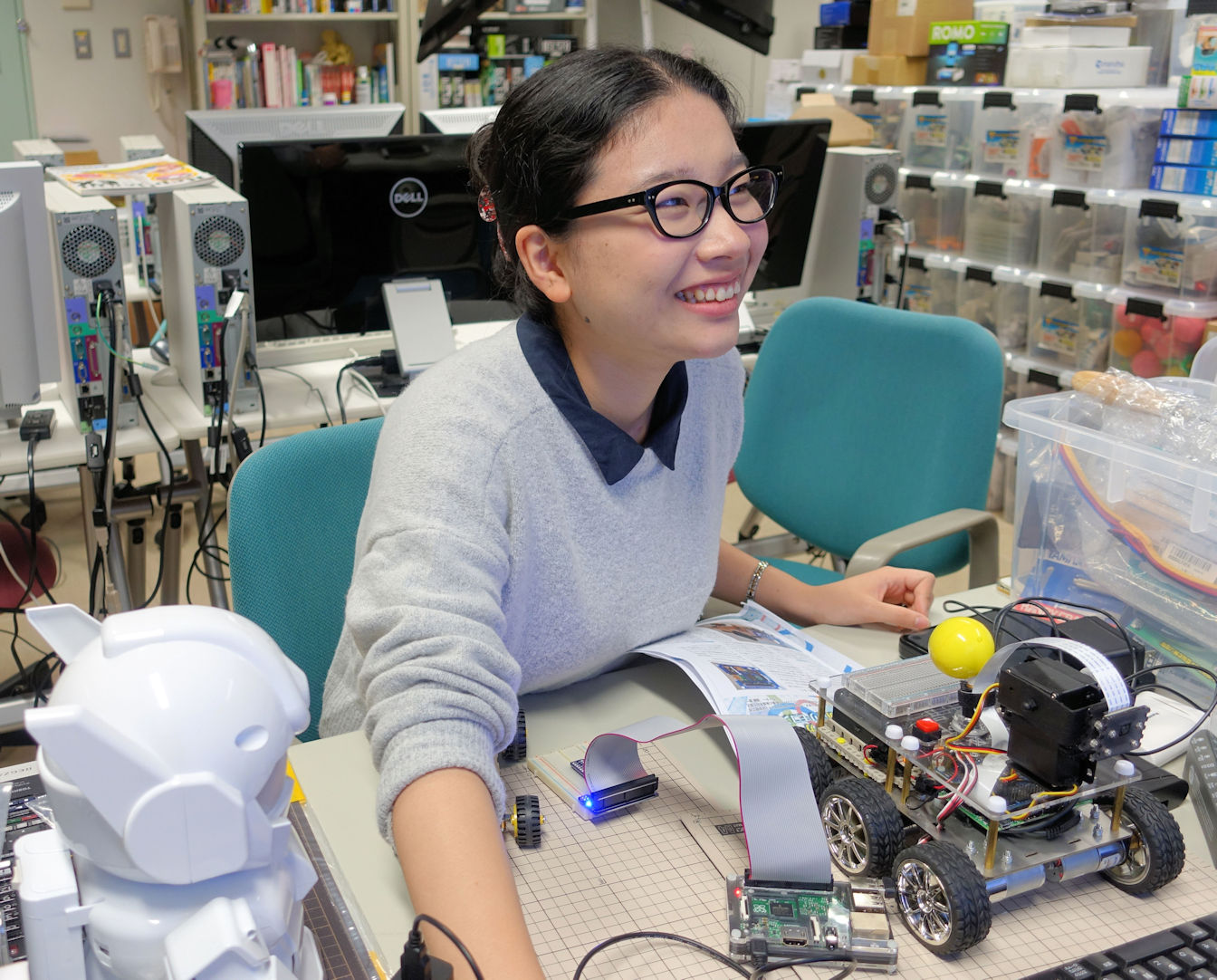
並列コンピュータの全コアが100%に振り切れた限界の状態で、頑張って超大規模計算している様子。
メモリ使用量は白い枠内で、この画面の初期の計算段階では、まだまだ余裕の状態です。
図をクリックすると、実寸の図が表示されます。
(共有メモリは 12TBの仕様のマシンで計算しています)
{kind=link}
開発メンバーの担当分野と開発状況 (2015年11月19日現在)
■ 入江 晋平(イリエ シンペイ)2回生(チームリーダー)
主にネットワーク通信のプログラム開発を担当しています。
今回の体験学習で、教材として使用するオリジナル開発の自律型ロボットは、
クワッドコアの小型コンピュータである "ラズベリーパイ2" を中心として、
ジャイロや赤外線などの各種センサーから送られてくる環境情報処理回路、
高精細カメラ、モーター制御基板、などを追加して極めて高機能なロボットを実現しています。
このようなロボットを、iPad や Android などのモバイル端末から操作する場合、
一般的には無線ルーターを経由した SSH 通信を行うのが常套手段となります。
このメソッドには、多くのノウハウが公開されているために、とても実装しやすいのですが、
致命的なデメリットとして、無線ルーターの通信圏内でしか操作できず、
さらに、通信遅延によるタイムラグが原因となって、ロボットに搭載された
カメラからの映像が滑らかでなくなったり、ロボットを俊敏に制御することが難しくなります。
そこで、ラズベリーパイ2を中心として構成した操作システムを新たに開発し、
操作側とロボット側のラズベリーパイ2同士のアドホック通信を確立することにより
極めて応答性能の高い通信システムを構築することに成功いたしました。
■ 浅井 彩夏(アサイ アヤカ)2回生
主にロボットのユーザーインターフェースのプログラムと、
複数台のロボットの協調動作により、より高度なタスクを達成できる
『集合知』のプログラム開発を担当しています。
iPhone や iPad に内蔵されているジャイロ・センサーなどを活用して、
ロボットの直感的な操作系を実現するためのシステムを開発中です。
開発に使っているプログラミング言語は、実習で習った Python と JavaScript を
使用しているので、まさに実習で習ったことを実践に生かすことができ、
プログラミングについて、より深い理解が得られ、大変楽しく開発作業を進めています。
アリのような昆虫では、一匹では単純な探索行動と、
フェロモンによる道しるべのマーキング程度しかできませんが、
大勢のアリから構成される集団になると、互いのセンサー情報を交換し、
集団で情報を共有することにより、集団でなければ達成できないタスクを達成することが可能となります。
いつの間にか、うっかり掃除し忘れた室内のケーキのかけらに、
どこからともなくアリの行列ができていることがありますが、
このような集団行動をロボットの群れの制御様式にアルゴリズム化できれば、
『集合知によるロボット制御』が可能となります。
本プロジェクトでは、この考え方をさらに進めて、『進化型集合知』のシステムを、
本学に導入されている共有メモリ型スパコン 『SGI UV 2000』 (384コア、1TB メモリ)上で、
1TB メモリを限界まで使用することにより、超大規模な進化型集合知シミュレーションを
行うことが可能です。
このシミュレーションの計算結果に基づいて、リアルなロボットの行動パターンの進化を
高速化することができます。
とても夢が溢れる最先端の近未来プロジェクトなので、本プロジェクトを成功させるために、
これからも精一杯頑張っていきたいと思います。
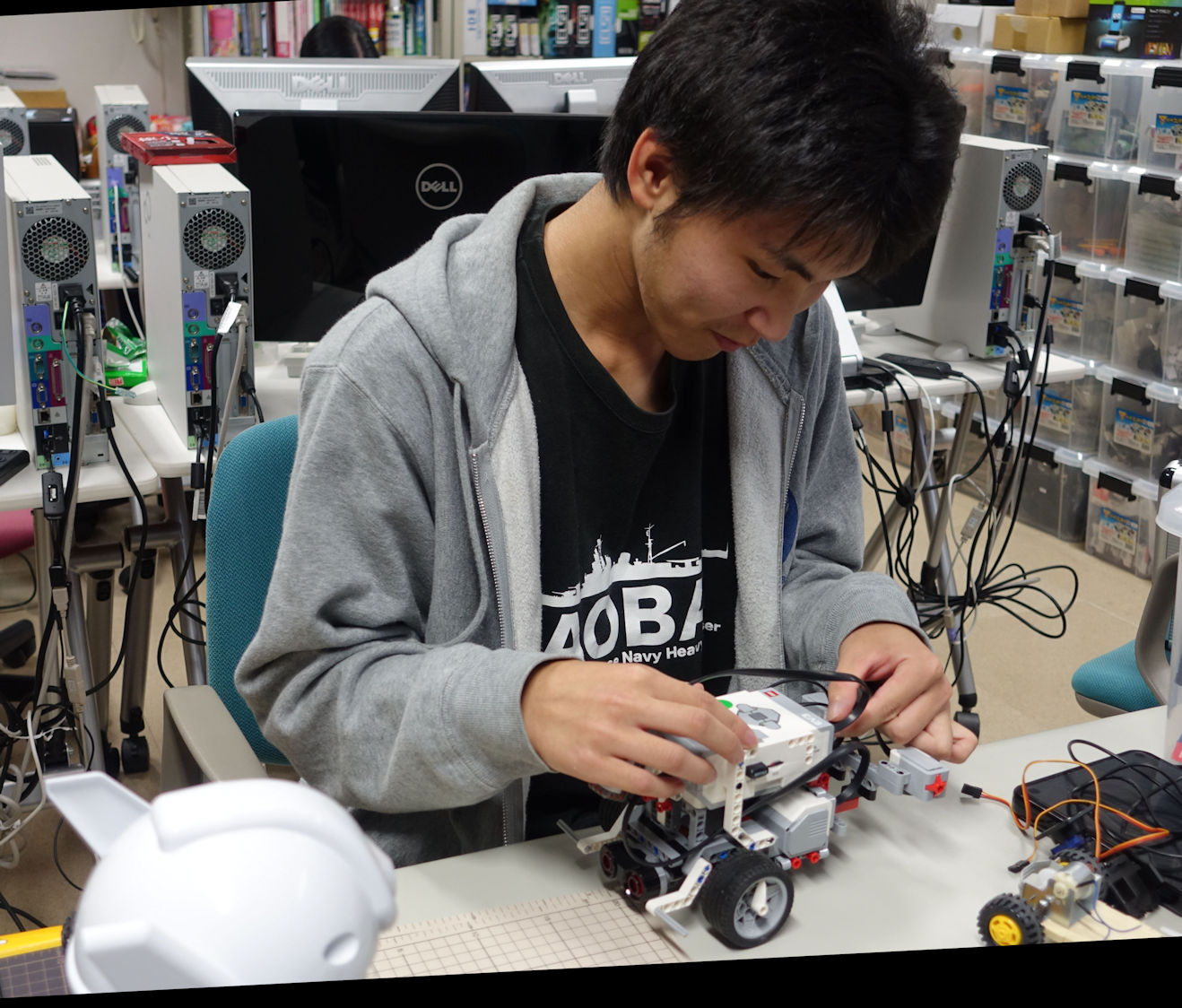
■ 若松 紘行(ワカマツ ヒロユキ)1回生
バイオロイドの基本となるコネクトームの研究開発を担当しています。
コネクトームの究極の目標は、ヒトの神経回路を計算機内に再構築し、
ヒトと同じ解像度と伝送率で、視覚、聴覚、嗅覚、味覚、触覚など、
環境からの入力情報をロボットなどのシステムに与えた場合に、
システム内に実装された人工的な神経回路網の情報処理により、ロボットの運動制御系に対して、
変動環境にもリアルタイムで適応制御を行えるシステムを構築することです。
現在、世界各地で精力的に研究が行われているコネクトームの研究は、
生物学でモデル生物として頻繁に活用されている『線虫』をベースにしています。
全神経細胞の結線構造がトレースされているため、非常に精度の高いシミュレーション実験が可能です。
最初の開発ステップとして、GoPiGo という組み立てロボットを活用して、
ロボットを制御するラズベリーパイ2に、Python で記述されたコネクトームのプログラムを転送して、
動作原理のチェック作業と、プログラム改良点について検討を行っているところです。
■ 杉山 美涼(スギヤマ ミスズ)3回生
進化型人工知能ロボットの3Dデザインと学習用テキストの作成・編集作業、
および広報戦略を担当しています。
現在は、試作段階なのでロボットはとてもシンプルな外見をしていて、
基本的には2枚のアクリル板から構成されています。
モーターの制御回路の配置や、各種センサー類の配置を、
単なる電子回路のノイズ対策などの観点から最適デザインを決めるのではなく、
外見的にも極めて商品価値の高い、美しいボディーデザインに仕上げたいと思っています。
現在は、プロ向けの3Dデザインソフトの王道である『Autodesk AutoCAD』を使って、
ボディーデザインを検討しています。
本学には、極めて精度の高い3Dプリンター『KEYENCE AGILISTA-3100』があるので、
これを使ってプロトタイプを作成し、実際のロボットに組み上げることが可能です。
このプロトタイプの制作プロセスを、3Dプリンターの迅速性を生かして、
何度か繰り返すことで、より洗練されたデザインのロボットを作成していきます。
学習用テキストしては、ある程度ロボットの組み立て経験があり、制御プログラミングの
スキルも高い中級者・上級者向けのコンテンツと、組み立てもプログラミングも全くの
未経験の初心者向けのコンテンツとでは、内容や学習工程だけでなく、
学習プロセスの時間管理スケジュールの詳細な検討が必要となるので、
そのための作業に取り組んでいる最中です。